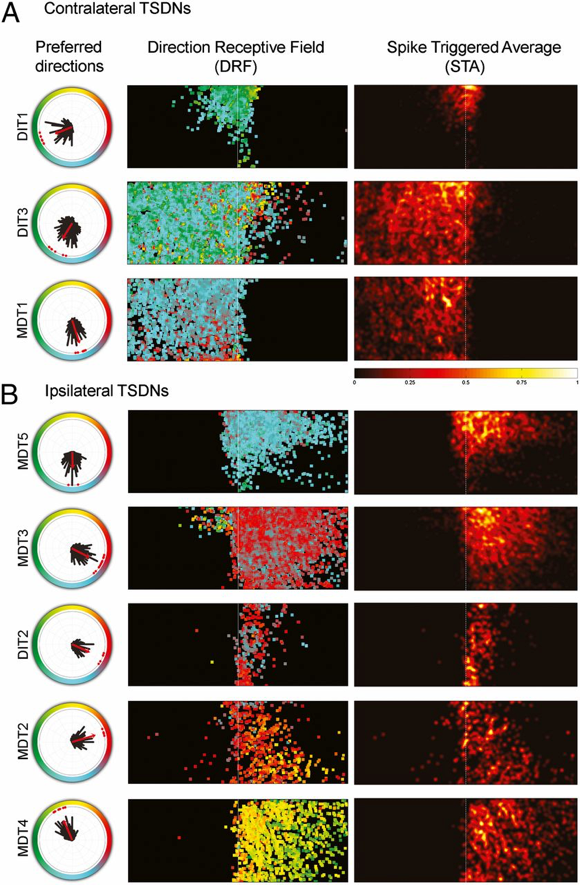
In order to replicate Paloma Gonzalez-Bellido’s experiment, I need to be able to manipulate the direction and position of the laser beam. In Paloma Gonzalez- Bellido’s 2012 paper she publish these results:
Gonzalez-Bellido, P. T., H. Peng, J. Yang, A. P. Georgopoulos, and R. M. Olberg. “Cozzarelli Prize Winner: Eight Pairs of Descending Visual Neurons in the Dragonfly Give Wing Motor Centers Accurate Population Vector of Prey Direction.” Proceedings of the National Academy of Sciences 110.2 (2012): 696-701. Web.
The diagrams on the left column plot the preferred direction of a certain neuron (labeled DIT.., MD… etc). Imagine that in the centers of the circles are the dragonflies, and that each color represents a position the target could be moving in. The red arrow points to the position that is preferred. The next column represents the flattened out screen. Each colored dot represents a pixel that the target has either started or passed through, and each color represents the direction. By looking at the left column, we can determine the direction the target was moving. The last column represents the firing rate- yellow being the greatest and black being the weakest.
I wrote a first draft of code, using Arduino, to mimic the experiment. Using the data collected about the preferred direction and the preferred starting location of the target, I designed code that would move the laser beam from each of the preferred starting locations for each of the neurons and travel in each of the neurons preferred directions.
For example, I wrote code for the neuron MDT3:
#include <Servo.h>
const int servo = 10; // The servo motor pin
const int servo2 = 11;
int laserPin = 12;
Servo myservo; // create servo object to control a servo
Servo myservo2;
int servoAngle= 0;
void setup() {
// Servo
pinMode(laserPin, OUTPUT); // set up the laser pin
myservo.attach(servo); // X servo
myservo2.attach(servo2); // Y servo
}
void loop(){
for (int i = 0; i < 11; i ++)
{
for (int j =0; j < 5; j ++)
{
digitalWrite(laserPin, LOW);
myservo.write(30); // X servo starting point
myservo2.write(60 - i*(2.5)); // Y starting point - moves with i
delay(100); // 100 millisecond delay
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 30; servoAngle < 55 ; servoAngle ++)
{
myservo.write(servoAngle); // X servo moves
delay(50);
}
}
delay(1000);
}
}
The result is:
Here is the first draft of the code for the final testing:
#include <Servo.h>
const int servo = 10; // The servo motor pin
const int servo2 = 11;
int laserPin = 12;
Servo myservo; // create servo object to control a servo
Servo myservo2;
int servoAngle=0;
void setup() {
// Servo
pinMode(laserPin, OUTPUT); // set up the laser pin
myservo.attach(servo); // attaches the servo to the servo pin
myservo2.attach(servo2);
// Inizialize Serial
}
void loop(){
//DIT1
for (int i = 8; i < 11; i ++)
{
for (int j = 0; j < 5; j ++)
{
myservo.write(55);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 30; servoAngle >10 ; servoAngle --)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//DIT3
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(55);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 45; servoAngle >20 ; servoAngle --)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//MDT1
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(55);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 55; servoAngle >20 ; servoAngle --)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//MDT5
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(20);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 20; servoAngle < 55 ; servoAngle ++)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//MDT3
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(30);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 30; servoAngle < 55 ; servoAngle ++)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//DIT2
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(30);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 30; servoAngle < 55 ; servoAngle ++)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//MDT2
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(30);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 30; servoAngle < 45 ; servoAngle ++)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
//MDT4
for (int i = 0; i < 11; i ++)
{
for (int j =0; j <5; j ++)
{
myservo.write(50);
myservo2.write(60 - i*(2.5));
delay(100);
digitalWrite(laserPin, HIGH); // turns the laser on
for(servoAngle = 50; servoAngle > 20 ; servoAngle --)
{
myservo.write(servoAngle);
delay(50);
}
digitalWrite(laserPin, LOW);
delay(2000);
}
delay(10000);
}
}
By Patricia Aguilar