-
 BizGrant Providers Agree, Neuroscience is Worth the Investment Several months ago, Mr. Skoczylas, an Elementary Tech Coordinator, was trying to figure out how to best introduce young students in his district to the intersection of Life Sciences and STEM. As you know, at Backyard Brains, our tools and labs make it easy for students to […]
BizGrant Providers Agree, Neuroscience is Worth the Investment Several months ago, Mr. Skoczylas, an Elementary Tech Coordinator, was trying to figure out how to best introduce young students in his district to the intersection of Life Sciences and STEM. As you know, at Backyard Brains, our tools and labs make it easy for students to […] -
 EducationWe visited University of Michigan’s campus during their annual “Xplore Engineering” camp. This multi-day event brings grandparents, parents, and their young scientists from all across the country to lovely summer Ann Arbor for a few days of science and engineering experiential opportunities.
EducationWe visited University of Michigan’s campus during their annual “Xplore Engineering” camp. This multi-day event brings grandparents, parents, and their young scientists from all across the country to lovely summer Ann Arbor for a few days of science and engineering experiential opportunities. -
 EducationFailure is an important part of theReiterative Design Process! For some students, dealing with failure can be tough. It’s frustrating to encounter obstacles in science! And for teachers – how do you grade a project when a student puts a lot of effort in, but keeps hitting roadblocks? Many of you already teach like this, but […]
EducationFailure is an important part of theReiterative Design Process! For some students, dealing with failure can be tough. It’s frustrating to encounter obstacles in science! And for teachers – how do you grade a project when a student puts a lot of effort in, but keeps hitting roadblocks? Many of you already teach like this, but […] -
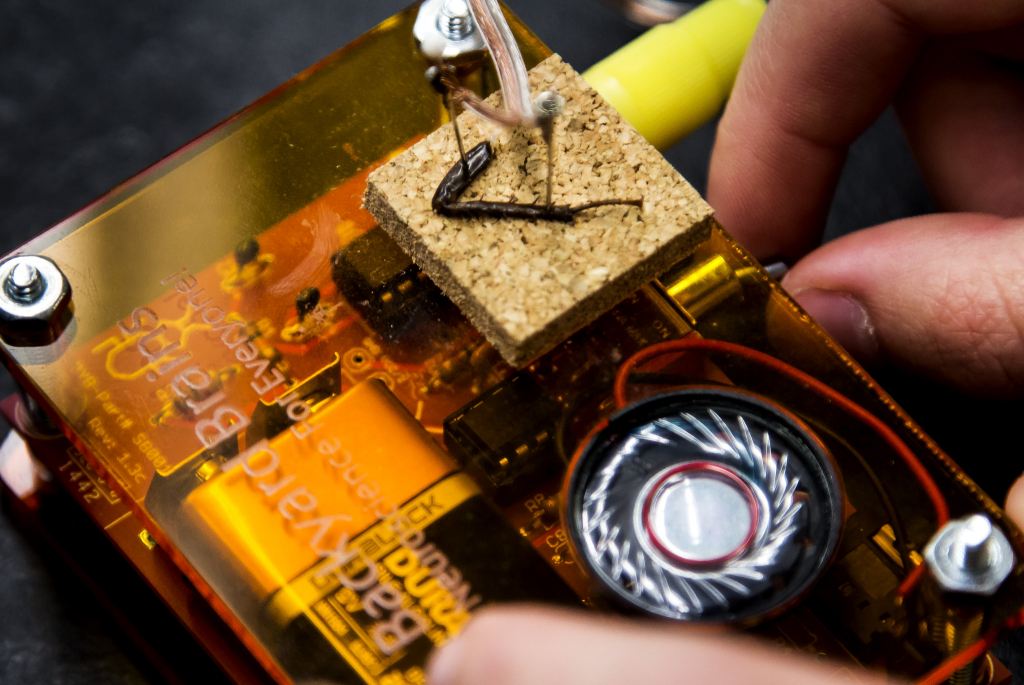
 EducationA simple Neuroprosthetic may be made with anything and everything! Recently, I’ve been working with an 8th grade STEM teacher – Ms. Amy Farkas, from Riverview, MI – as she guides her students through a unit on prosthetics, neuroprosthetics, and other assistive technology. She began her unit having her students learn about hand articulation, tendons, and the […]
EducationA simple Neuroprosthetic may be made with anything and everything! Recently, I’ve been working with an 8th grade STEM teacher – Ms. Amy Farkas, from Riverview, MI – as she guides her students through a unit on prosthetics, neuroprosthetics, and other assistive technology. She began her unit having her students learn about hand articulation, tendons, and the […] -
 EducationWe can’t help you get as strong as Terry, but we can teach you the tech to build this yourself! Following the launch of our Brain-Music Interface experiment trilogy, we thought it was appropriate to revisit this classic… While we have our suspicions that there may be a bit more stimulation rather than control going on in […]
EducationWe can’t help you get as strong as Terry, but we can teach you the tech to build this yourself! Following the launch of our Brain-Music Interface experiment trilogy, we thought it was appropriate to revisit this classic… While we have our suspicions that there may be a bit more stimulation rather than control going on in […] -
 EducationMusic is a passion, an art, a science, but maybe most importantly… music is fun! Variations of “electronic instruments” can be traced back as early as the late 1700s, but it is no exaggeration to say that the biggest breakthrough was the invention of Synthesizers in the 1950s. This marriage of music and electrical engineering […]
EducationMusic is a passion, an art, a science, but maybe most importantly… music is fun! Variations of “electronic instruments” can be traced back as early as the late 1700s, but it is no exaggeration to say that the biggest breakthrough was the invention of Synthesizers in the 1950s. This marriage of music and electrical engineering […] -
EducationCheck out these awesome examples of Citizen Neuroscience! Another Brain Awareness week has come and gone. But if you missed it, don’t think you can’t still get involved with Neuroscience Outreach! Organized by the Dana Foundation, Brain Awareness Week is a chance for educators to highlight neuroscience! Whether you want to teach neuroscience in your classroom, or […]
-
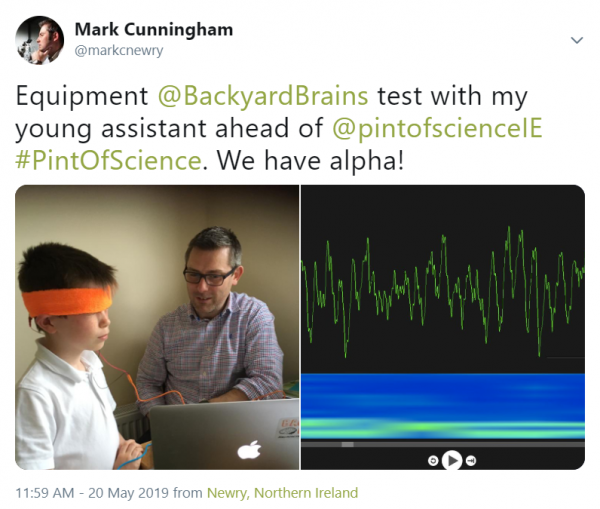 EducationTake it from Twitter: Low-cost EEG is a powerful teaching tool! As a business, it can be strange to package and ship off all these different neuroscience education tools, wondering if they’ll like their new home, will they make a difference in this big, strange world? Much like a proud parent, we are always excited […]
EducationTake it from Twitter: Low-cost EEG is a powerful teaching tool! As a business, it can be strange to package and ship off all these different neuroscience education tools, wondering if they’ll like their new home, will they make a difference in this big, strange world? Much like a proud parent, we are always excited […] -
 EducationTim marched his way down to El Hormiguero 3.0 (Spanish for “The Anthill”) to to continue talking about electrical impulses in the body. A special guest got to play with our new Claw model, and we dropped teasers for a few new products and experiments that have everybody firin’ and flexin’! ???
EducationTim marched his way down to El Hormiguero 3.0 (Spanish for “The Anthill”) to to continue talking about electrical impulses in the body. A special guest got to play with our new Claw model, and we dropped teasers for a few new products and experiments that have everybody firin’ and flexin’! ??? -
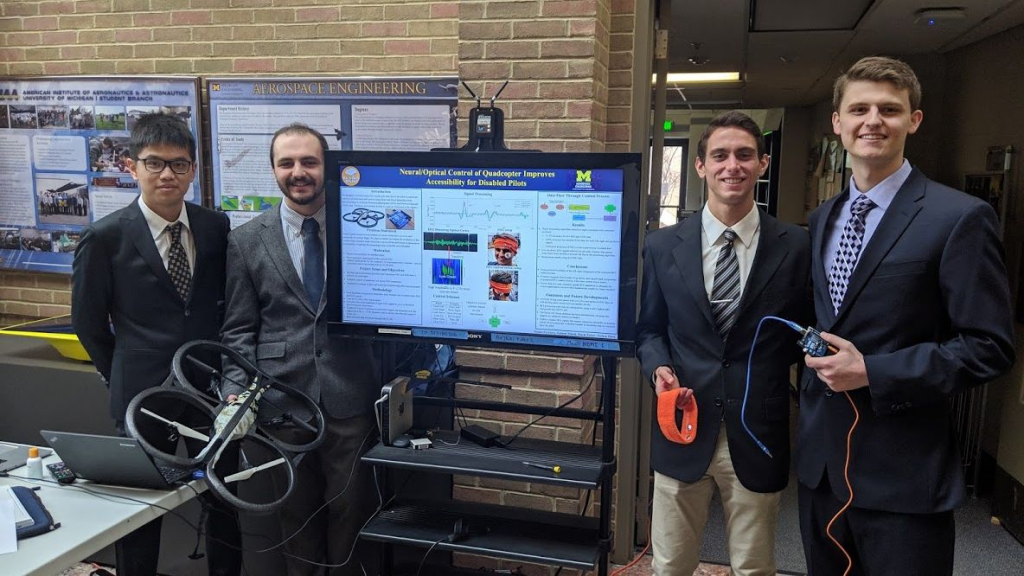 EducationThis University of Michigan student team developed a way to control a drone with a new kind of controller… We work with students of all ages — from outreach to early elementary, to hands-on demonstrations, labs, and even research with students from fifth grade to… well, grad school and beyond! We wanted to share this novel and […]
EducationThis University of Michigan student team developed a way to control a drone with a new kind of controller… We work with students of all ages — from outreach to early elementary, to hands-on demonstrations, labs, and even research with students from fifth grade to… well, grad school and beyond! We wanted to share this novel and […] -
 EducationMy name is Azrin Khan and I am currently a junior (11th grade) in Francisco Bravo Medical Magnet Senior High School in California. My purpose is to build a device which will alert humans when they are going to have muscle cramps, and it will keep a record of the intensity of the cramp and […]
EducationMy name is Azrin Khan and I am currently a junior (11th grade) in Francisco Bravo Medical Magnet Senior High School in California. My purpose is to build a device which will alert humans when they are going to have muscle cramps, and it will keep a record of the intensity of the cramp and […] -
 EducationHey everyone! I’m Pablo, a junior from Nido de Aguilas High School in Santiago, Chile. In my free time, I like to doodle and run. My project is a multi-channel version of the experiment that my colleague and friend Cristian developed: it consists of using the SpikerShield Pro’s ability to get data from multiple channels […]
EducationHey everyone! I’m Pablo, a junior from Nido de Aguilas High School in Santiago, Chile. In my free time, I like to doodle and run. My project is a multi-channel version of the experiment that my colleague and friend Cristian developed: it consists of using the SpikerShield Pro’s ability to get data from multiple channels […]